Основная информация
Год выпуска - 2002. Новая механика на первых трех осях отличает этот робот от предыдущих моделей M97 и M98. 6-осевой манипулятор IRB6400 и контроллер S4Cplus обеспечивают короткое и точное время цикла, быструю перенастройку и стабильно высокую точность процессов. Эти роботы подходят для применения в обслуживании прессов и погрузке-разгрузке благодаря длинному вылету руки (3 метра).
Усовершенствованные возможности связи контроллера S4C: CAN-bus, Interbus- S slave, удаленные входы/выходы AllenBradley, Ethernet...
Язык программирования RAPIDдемонстрирует расширенные программные возможности.
Адаптируемость
Компактный дизайн IRB6400 с небольшой зоной взаимных помех обеспечивает возможность его инсталляции в цехах с высокой плотностью производственного оборудования. Система связи, интегрированная в основание робота, - легкозаменяемая, а увеличение выноса руки с 2.5 до 3 м занимает менее 30 минут.
Оси робота калибруются поочередно, что обеспечивает быстрое возобновление процесса производства.
Характеристики робота:
* Количество осей: 6
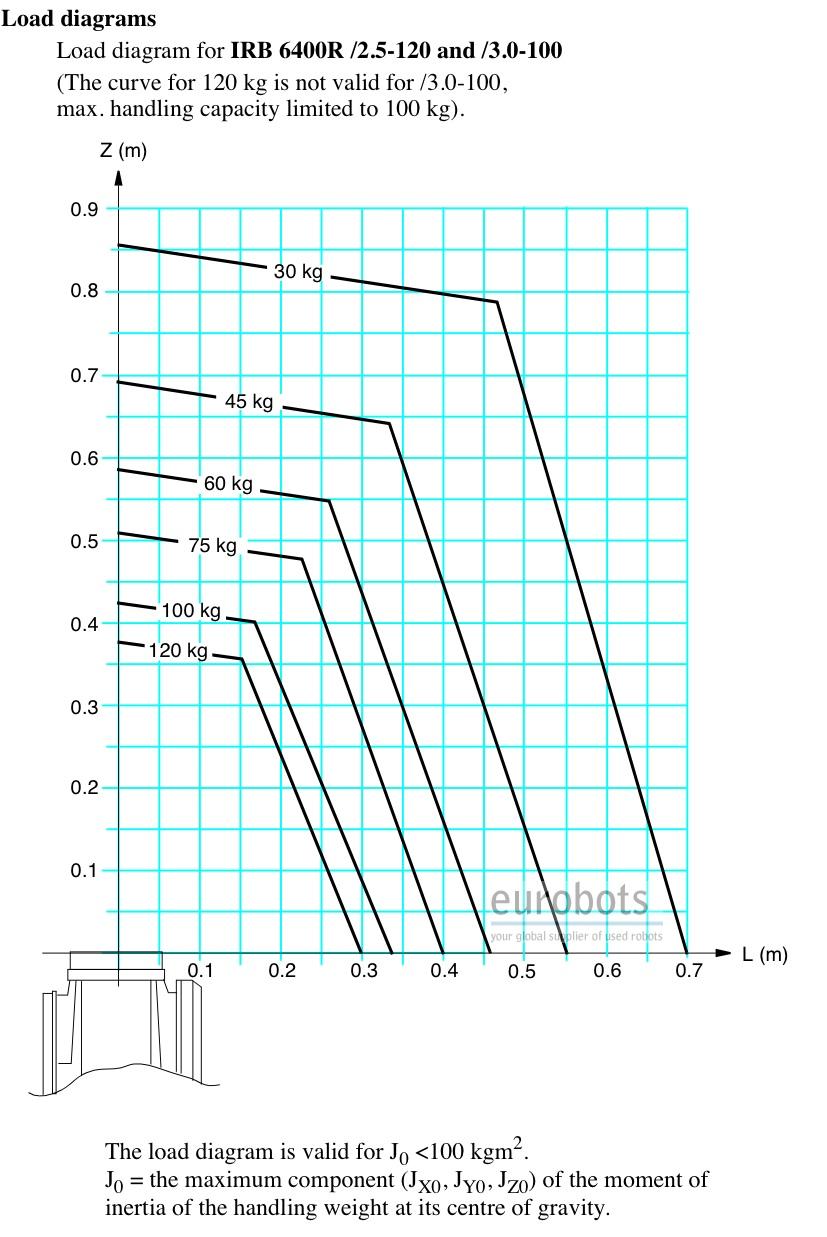
* Максимальная грузоподъемность: 100 кг
* Максимальный радиус действия: 3000 мм
* Точность: 0,2 мм
* Контроллер: S4C
Скорость движения:
* Ось 1: 110º/сек
* Ось 2: 100º/сек
* Ось 3: 100º/сек
* Ось 4: 210º/сек
* Ось 5: 150º/сек
* Ось 6: 210º/сек
Области применения:
- точечная сварка
- обслуживание прессов
- погрузка-разгрузка материалов
- обслуживание станков
- паллетизация
- сборка
Области применения
Точечная сварка , Поддержка прессы , Паллетирование , Погрузка и разгрузка деталей , Обработка , Обработка деталей , Склеивание - склеивание














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}